Linienfolger
Linienfolger
Funktionsweise
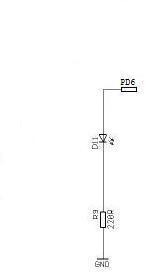
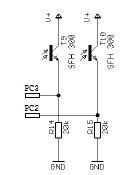
Die Front LED beleuchtet den Untergrung auf dem der ASURO f‰hrt. Die beiden Fototransistoren T9 und T10 fangen das reflektierte Licht auf. Die Prozessor Ports PC2 und PC3 sind als A/D Wandler Ports initialisiert und messen die Spannung an den Fototransistoren. Ðber dunklem Untergrund wird weniger Licht reflektiert als ¸ber hellem Untergrund. Entsprechend ‰ndert sich die Spannung an den Fototransistoren und damit der gemessene A/D Wert.
Besondere Verwendung des Liniensensors
Abgrunderkennung
Der Liniensensor kann so programmiert werden, dass der Asuro einen Abgrund erkennen kann und zur¸ckweicht, ohne in die Tiefe zu st¸rzen. Ein Video dazu gibt es bei Youtube http://www.youtube.com/watch?v=ibAttdmQ02w
Balancierender Asuro
Von RN-User waste stammt die Idee, den Liniensensor daf¸r zu benutzen, dass der ASURO auf Hinterr‰dern balancieren kann, ohne mit dem Tischtennisball den Boden zu ber¸hren. Allerdings sind dazu einige Umbaumaþnahmen erforderlich. N‰heres siehe im Roboternetz. Ein Video gibt es ebenfalls http://www.youtube.com/watch?v=V0VxL2VqIWQ
Programmierung
Um die Motoren anzusteuern gibt es in der Asuro Bibliothek die fertige Funktion LineData() und einige Definitionen. Ein Code Schnipsel dazu:
unsigned int ldata[2]; /* Speichervariablen f¸r Liniensensor Daten */
int diff, offset;
FronLED(ON); /* Front LED an */
for (j = 0; j < 0xFF; j++) LineData(lineData); /* Warten bis Werte stabil sind */
LineData(ldata); /* Einlesen der Liniensensor Daten */
offset = ldata[LINKS] - ldata[RECHTS]; /* Grundoffset zwischen linkem und rechtem Sensor feststellen */
while(1)
{
LineData(ldata); /* Einlesen der Liniensensor Daten */
diff = (ldata[LINKS] - ldata[RECHTS]) - offset; /* Differenz feststellen */
if (diff > 4) /* links heller als rechts */
BackLED(ON,OFF); /* linke hintere LED an */
else (if (diff < -4) /* rechts heller als links */
BackLED(OFF,ON); /* rechte hintere LED an */
}
Ein komplettes Beipiel zum Liniensensor findet sich hier.
Verbesserungsvorschl‰ge:
- Die beiden Fototransistoren mit Schrumpfschlauh besser gegen seitlich empfangenes Fremdlicht abschirmen.
- Beim Auswerten der Helligskeitswerte nicht mit Absolutwerten rechnen sondern mit Differenzen. So kˆnnen Fremdlicht Einfl¸sse verringert werden
- Die rote Frant LED ist nicht besonders lichtstark. Zudem sind die Fototransistoren mehr empfindlicher f¸r Infrarot Licht. Statt der roten LED kˆnnte man auch eine Infrarot LED verwenden. Allerdings ist Infrarot Licht nicht sichtbar. Man kˆnnte auch eine lichtstarke weiþe LED nehmen. Allerdings muþ man dabei beachten, daþ der Maximalstrom des Prozessor Ports (20mA) nicht ¸berschritten wird, und ob der LED Vorwiderstand (R9) richtig dimensioniert ist.
- Wenn man sp‰ter einmal eine Erweiterungsplatine einsetzen mˆchte, sollte man die Bauteile des Liniensensor steckbar machen, wie unter Liniensensor Modifikation beschrieben. Sonst muþ man erst m¸hsam die Bauteile wieder auslˆten.