Odometrie
Odometrie
Funktionsweise
Mit dem Asuro Bausatz werden auch je 2 Encoder Scheiben mit 8 bzw. 12 Sektoren zum Aufkleben mitgeliefert. Damit erh‰lt man 40 bzw. 60 Impulse pro Reifenumdrehung.
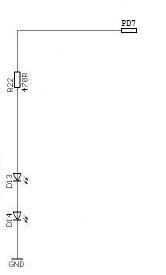
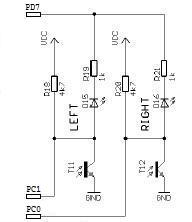
Die Encoder Scheiben werden von IR_Leds (D13, D14) angestrahlt. Die Foto-Transistoren (T11, T12) messen das reflektierte Licht. Der Prozessor miþt ¸ber die Analog/Digital Wandler Ports die Spannung an den Foto- Transistoren und vergleicht diese mit vorgegeben Referenzwerten f¸r Hell/Dunkel. Die Wechsel zwischen Hell/Dunkel werden gez‰hlt und kˆnnen vom Benutzer Programm ausgewertet werden. Die Odometrie Messung kann vom Benutzer Programm manuell abgefragt werden, ¸ber die Funktion OdometrieData(unsigned int *data) oder automatisch im Hintergrund (Interruptgesteuert) durch die Funktion EncoderInit(void). Diese Funktion ist nur in der erweiterten Asuro Bibliothek vorhanden.
W‰hrend der Odometrie Messung sind die Prozessor Ports PC0, PC1 als Eingang und PD7 als Ausgang geschaltet. Deshalb kˆnnen die beiden Back-LEDs nicht benutzt werden. Umgekehrt gilt: Schaltet man die Back LEDs an, werden die Ports PC0 und PC1 als Ausgang und PD7 als Eingang geschaltet und die Odometrie Messung ist nicht mehr mˆglich.
Probleme mit der Odometrie
Die Odometrie Daten des Asuro sind leider nicht sehr brauchbar. Sie sind zum einen vom Umgebungslicht abh‰ngig, zudem hat das Zahnrad zu viel Spiel auf der Achse, womit sich der Abstand zu den Sensoren ‰ndert.
Abhilfe gegen Umgebungslicht schafft das Anbringen einer Abdeckung aus Papier ¸ber IR-Led und Fototransistor. Die Zahnr‰der kann man mit einer aufgeklebten Unterlegscheibe etwas stabilisieren.
Eventuell m¸ssen die Grenzwerte f¸r Hell/Dunkel in der Asuro Bibliothek angepaþt werden.
Um den Asuro zum Geradeausfahren zu bewegen, ist es auch mˆglich den Unterschied zwischen den beiden Antrieben empirisch zu ermitteln und als feste Grˆþe in seine Programme einzubauen.
Weiterf¸hrende Links:
- Wikipedia
- Roboternetz Thread - Odometrie von Asuro
- Roboternetz Thread - ASURO - Ododmetrie